Abstract
Motion manifold primitives (MMP), a manifold-based approach for encoding basic motion skills, can produce diverse trajectories, enabling the system to adapt to unseen constraints. Nonetheless, we argue that current MMP models lack crucial functionalities of movement primitives, such as temporal and viapoints modulation, found in traditional approaches. This shortfall primarily stems from MMP’s reliance on discrete-time trajectories. To overcome these limitations, we introduce motion manifold primitives++ (MMP++), a new model that integrates the strengths of both MMP and traditional methods by incorporating parametric curve representations into the MMP framework. Furthermore, we identify a significant challenge with MMP++: performance degradation due to geometric distortions in the latent space, meaning that similar motions are not closely positioned. To address this, isometric motion manifold primitives++ (IMMP++) is proposed to ensure the latent space accurately preserves the manifold’s geometry. Our experimental results across various applications, including two-DoF planar motions, seven-DoF robot arm motions, and SE(3) trajectory planning, show that MMP++ and IMMP++ outperform existing methods in trajectory generation tasks, achieving substantial improvements in some cases. Moreover, they enable the modulation of latent coordinates and via-points, thereby allowing efficient online adaptation to dynamic environments.
Illustration of MMP++

Modulation: Generated trajectories smoothly transform as the latent value \( z \) and initial and final configurations \( q_i, q_f \) change.
Online adaptation: By adjusting the latent value \( z \) online, the robot can adapt to unseen and dynamic changes in the environment.
1. 7-DoF Franka Collision-Free Motion
Modulation
Online adaptation
2. SE(3) Pouring Motion
Modulation
Online adaptation
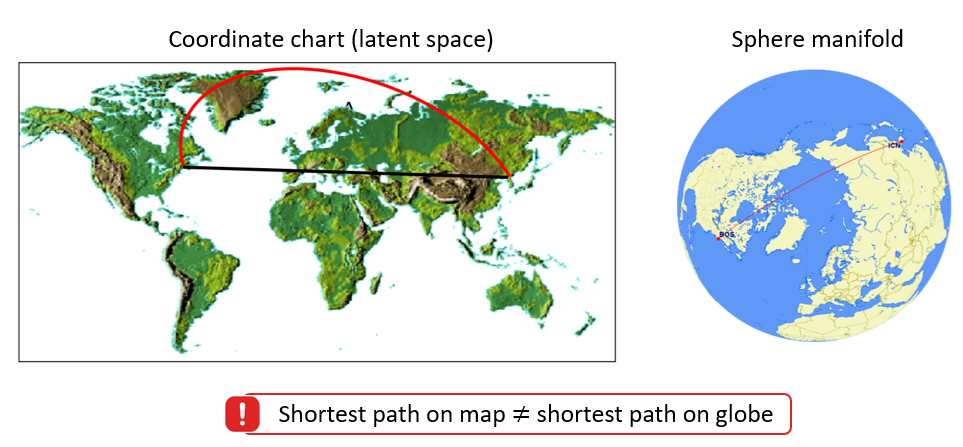
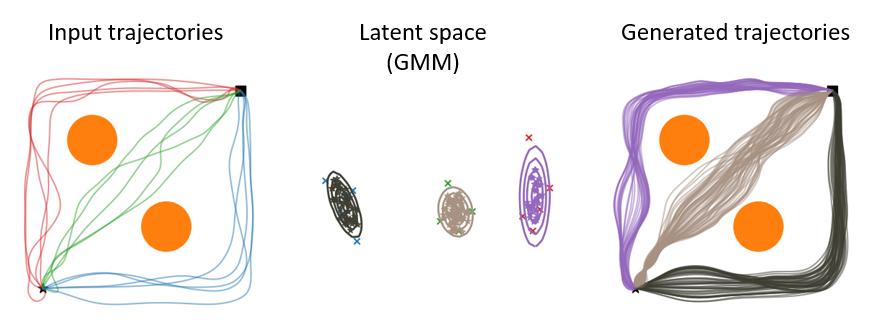
Geometric Distortion in MMP++
Example: MMP++ of 2D Trajectories
Analogy: Geometric Distortion in World Maps
Isometric MMP++
Example: Isometric MMP++ of 2D Trajectories
Related works (geometry-preserving autoencoders)
1. Regularized Autoencoders for Isometric Representation Learning (Lee et al., 2022 ICLR)2. Geometric Autoencoders - What You See is What You Decode (Nazari et al., 2023 ICML)
3. Graph Geometry-Preserving Autoencoders (Lim et al., 2024 ICML)
Citation
@ARTICLE{10637485,
author={Lee, Yonghyeon},
journal={IEEE Transactions on Robotics},
title={MMP++: Motion Manifold Primitives With Parametric Curve Models},
year={2024},
volume={40},
number={},
pages={3950-3963},
keywords={Trajectory; Manifolds; Task analysis; Adaptation models;
Robot kinematics; Modulation; Measurement;
Autoencoders; isometric representation learning; manifold;
movement primitives; Riemannian geometry},
doi={10.1109/TRO.2024.3444068}}